2015년 ICCV에 발표된 “Fast R-CNN”은 이전 네트워크와 비교했을 때 비약적인 속도의 향상을 불러왔다. 하지만 아직 실시간으로 동작하기 어려운 속도를 보여준다. 이때 가장 많이 시간이 들었던 부분은 Selective search를 이용한 Region proposal 연산이었다. 본 논문에서는 anchor box 개념을 도입해 convolutional network로 Region proposal을 수행하는 Region Proposal Network(RPN)을 소개한다.
Faster R-CNN Arichtecture
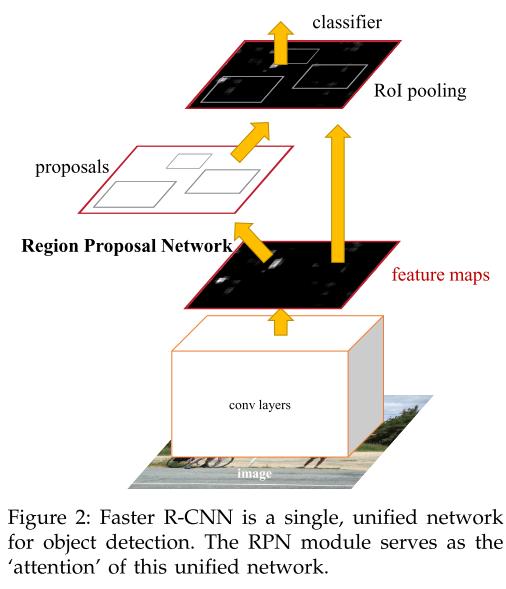
Faster R-CNN은 다음과 같이 두개의 module로 나뉜다.
- Region Proposal Network (RPN)
- Fast R-CNN detector
두 개의 모듈은 하나의 Conv Net을 공유하고 있으며 RPN은 이전의 Selective search와 같은 역할을 해준다.
Region Proposal Network
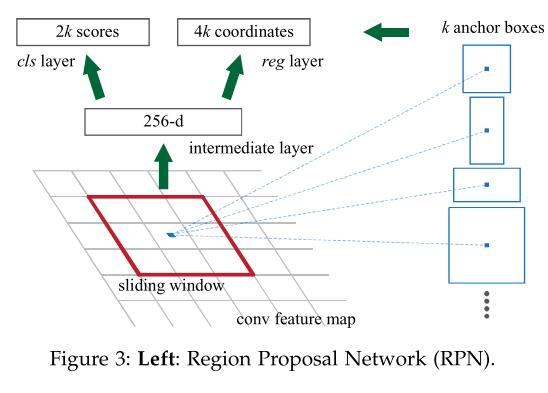
RPN은 마지막 conv layer의 output에서 \(n \times n\) 크기의 conv layer 연산을 수행한다(크기를 보존하기 위해 padding을 한다). 이후 \(1 \times 1 \times (2 \times k)\), \(1 \times 1 \times (4 \times k)\) 연산을 병렬로 수행한다. 여기서 \(k\)는 anchor box의 수이다. 본 논문에서는 n을 3으로 설정했고 3개의 비율(1:1,1:2,2:1)과 3개의 크기(128,256,512)로 총 9개의 anchor box를 정의했다(k=9).
여기서 positive anchor box의 기준은 두가지 이다.
- ground-truth box와의 IOU가 가장 높은 anchor
- IOU가 0.7 이상인 anchor
본 논문에서는 두 번째 경우 드물게 positive sample을 찾지 못해 첫 번째도 정의 했다고 한다. 추가적으로 non-positive anchor중 0.3 이하의 IOU를 가지는 영역은 negative sample로 설정되었고 나머지 anchor는 objective function에 참여하지 않는다. 이 두 영역은 나중에 다시 ROI pooling을 통해 Fast R-CNN Classifier의 입력으로 들어간다. 동일한 ground truth에는 여러개의 anchor box가 설정될 수 있고 NMS 과정을 거쳐서 positive와 negative의 비율이 1:1로 되게 설정한다고 한다.
RPN의 loss function은 다음과 같다.
\[L(\left\{p_{i}\right\},\left\{t_{i}\right\}) = \frac{1}{N_{cls}} \sum_{i} L_{cls}(p_{i},p_{i}^{*}) + \lambda \frac{1}{N_{reg}} \sum_{i} p_{i}^{*}L_{reg}(t_{i},t_{i}^{*})\]여기서 \(N_{cls}\)는 bach_size이며, \(N_{reg}\)는 모든 anchor의 수이다. 논문에서는 각각 256, (256 x 9)로 설정 되었다. \(\lambda\)는 두 term의 균형을 맞추기 위한 하이퍼 파라미터인데 본 논문에서는 10으로 설정되었다. \(L_{cls}\)는 오브젝트인지 아닌지에 대한 loss이고 \(L_{reg}\)는 bounding box에 대한 loss이다(Fast R-CNN과 완전 동일). \(L_{cls}\) 식은 아래와 같다.
\[L_{cls}(p_i,p^{*}) = -p^{*}_{i}log(p_{i}) - (1-p^{*}_{i})log(1-p_{i})\]논문 초반부에 계속 attention을 도입했다고 하는데 binary crossentropy를 통해 attention을 적용했다는 것 같다.
RPN을 Training 할때 나머지 부분은 다음과 같다.
- RPN initialize : 평균 0, 분산 0.01을 갖는 가우시안 분포
- Shared Conv net initialize : pretrained model for ImageNet classification
- Learning rate : 0.001 for 60k batches, 0.0001 for next 20k batches (PASCAL VOC dataset 기준)
- SGD momentum/ weight decay : 0, 0.0005
4-Step Alternating Training
Faster R-CNN은 RPN과 Fast R-CNN을 학습하기 위해 다음과 같은 과정을 거친다.
- 위에 나온대로 초기화와 pretrained model을 사용해 RPN을 fine tuning한다.
- RPN에서 생성된 proposal을 사용해 detection network(Fast R-CNN)를 학습한다. 이때, 둘은 Conv net을 공유하지 않는다.
- fine tuning된 detection network에 RPN을 새로 초기화해 추가한다. 이때부터 Conv Net은 공유된다.
- 공유된 Conv net과 RPN을 고정시키고 detection의 fc layer만 fine tuning 한다.
Result
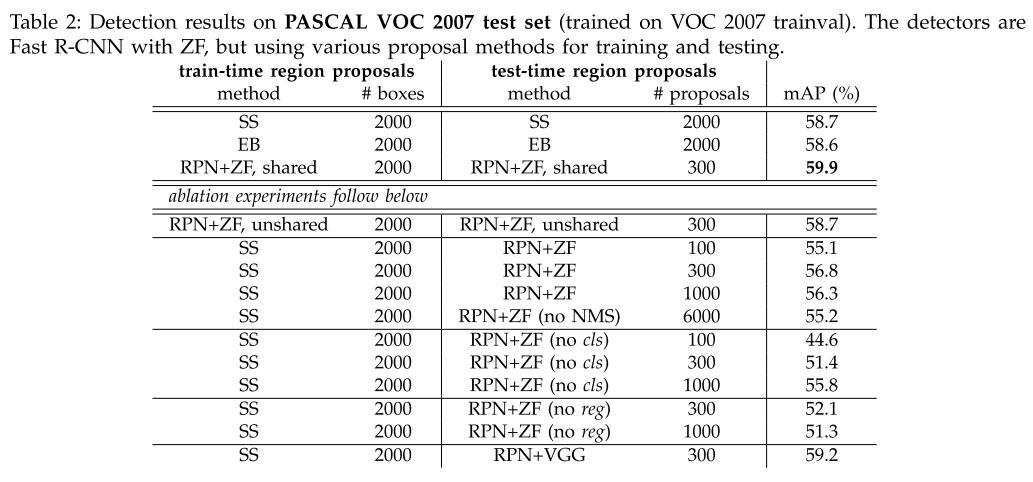

Tabel 2 는 Selective Search(SS), Edge Box(EB), RPN을 사용했을 때 정확도를 보여준다. RPN을 이용했을 때 정확도가 가장 높았으며 Table 5에 나온 것과 같이 속도도 월등히 빠르다(다만 SS는 CPU환경에서 측정한 것이다).
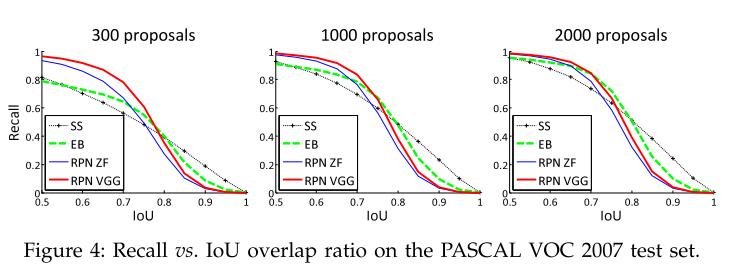
위 그림은 Proposal 개수와 IOU threshold를 조절했을 때의 recall값을 보여준다. RPN은 cls 값을 기준으로 NMS를 하기 때문에 적은 Proposal에서도 더 높은 정확도를 획득할 수 있다는 것을 보여준다.
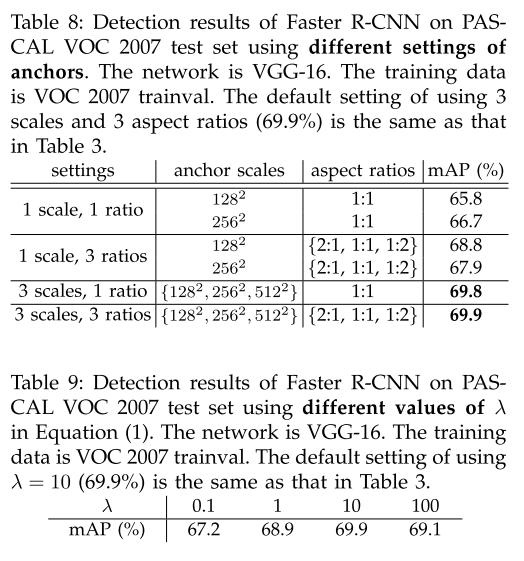
논문에서는 anchor box에 대한 실험과 \(\lambda\)에 대한 실험도 진행했었는데 논문에서 사용한 것들이 가장 높은 정확도를 획득했다.
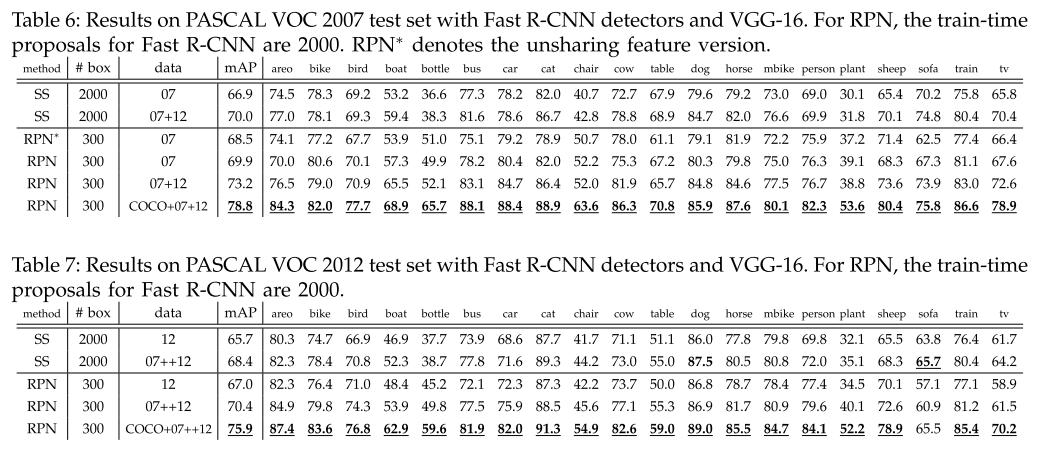

위 사진은 각각 PASCAL VOC 2007,2012, COCO MS Dataset에서의 정확도를 보여준다. 모든 논문이 그러하듯 가장 높은 정확도를 보여준다.
Reference
[1] S. Ren, K. He, R. Girshick. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In NIPS, 2015.
Comments