해리스 코너 (Harris Corner)
해리스는 모라벡의 마스크를 중심에서 멀어질수록 서서히 값이 작아지는 가우시안 마스크 G(x,y)로 대치하였다.
이렇게 해서 Sum of Squared Difference(SSD)는 다음의 가중치 제곱차의 합(Weighted Sum of Squared Difference(WSSD))로 확장된다.
위의 식은 특징이 될 가능성을 좀더 정밀하게 측정해 주는데, 실제 구현할 때 몇 가지를 고려해야 한다. 이중 가장 중요한 문제는 (v,u)를 어떻게 변화시켜 주위를 조사할 것인지에 관한 것이다.
모라벡의 경우 한 화소만 이동시켜 동서남북(S(0,1),S(0,-1),S(1,0),S(-1,0))을 조사 했다. 하지만 이러한 경우 모든 방향을 동등하게 취급하는 등방성(isotropic property)를 만족하지 못한다.
해리스는 등방성을 만족하기 위해 미분을 도입했다. 테일러 확장(Taylor expansion)에 따르면 아래의 식이 성립한다.
dx와 dy는 각각 [-1,0,1], [-1,0,1]^T 마스크를 영상에 적용한 영상이다.
이 식을 S(v,u) 식에 대입하면 아래의 식을 얻는다.
\[S(v,u) \cong \sum_{y} \sum_{x} G(y,x)(vd_{y}(y,x)+ud_{x}(y,x))^2\]해리스는 이 식에서 더 나아가 (v,u)를 바꾸어 가며 인근을 조사하는 것이 아닌, 현재 위치의 영상 ‘구조’를 나타내는 무엇인가를 도출하기 위해 다음과 같이 식을 옮겼다.
\(S(v,u)\)
\(\cong \sum_{y} \sum_{x} G(y,x) (vd_{y}+ud_{x})^2\)
\(=\sum_{y} \sum_{x} G(y,x) (v^2d_{y}^2+2vud_{y}d_{x}+u^2d_{x}^2)\)
\(=\sum_{y} \sum_{x} G(y,x) \begin{pmatrix}v & u \end{pmatrix} \begin{pmatrix}d_{y}^2 &d_{y}d_{x} \\ d_{y}d_{x} & d_{x}^2 \end{pmatrix} \begin{pmatrix} v \\ u\end{pmatrix} \\\)
\(=\begin{pmatrix}v & u \end{pmatrix} \sum_{y} \sum_{x} G(y,x) \begin{pmatrix}d_{y}^2 &d_{y}d_{x} \\ d_{y}d_{x} & d_{x}^2 \end{pmatrix} \begin{pmatrix} v \\ u\end{pmatrix}\)
\(= \begin{pmatrix}v & u \end{pmatrix} \begin{pmatrix}\sum_{y} \sum_{x} G(y,x)d_{y}^2 & \sum_{y} \sum_{x} G(y,x)d_{y}d_{x} \\\sum_{y} \sum_{x} G(y,x)d_{y}d_{x} & \sum_{y} \sum_{x} G(y,x)d_{x}^2 \end{pmatrix} \begin{pmatrix}v \\ u \end{pmatrix}\)
\(= \begin{pmatrix}v & u \end{pmatrix}\begin{pmatrix} G \circledast d_{y}^2 & G \circledast d_{y}d_{x} \\ G \circledast d_{y}d_{x} & G \circledast d_{x}^2 \end{pmatrix} \begin{pmatrix}v \\ u \end{pmatrix}\)
\(= \mathbf{uAu^{T}}\)
여기서 행렬 A는 해리스가 제안한 코너 검출 알고리즘에서 핵심적인 역할을 한다.
행렬 A는 자가 공관계(auto-correlation) 행렬 또는 2차 모멘트 행렬(second moment matrix)이라 불린다.
행렬 A는 (v,u)와 무관하게 계산할 수 있기 때문에 모라벡 알고리즘 처럼 일일히 (v,u)를 옮겨가며 계산할 필요가 없다.
다음과 같이 세점의 2차 모멘트 행렬이 있다고 가정해보자.
| a | b | c | |
|---|---|---|---|
| 2차 모멘트 행렬 | \(A=\begin{pmatrix}0.522 & -0.199 \\ -0.199 & 0.527 \end{pmatrix}\) | \(A=\begin{pmatrix}0.522 & -0.199 \\ -0.199 & 0.527 \end{pmatrix}\) | \(A=\begin{pmatrix}0.522 & -0.199 \\ -0.199 & 0.527 \end{pmatrix}\) |
| 고유값 | \(\lambda_{1}=0.7235, \lambda_{2}=0.3255\) | \(\lambda_{1}=0.8087, \lambda_{2}=0.0673\) | \(\lambda_{1}=0.0, \lambda_{2}=0.0\) |
| 특징 가능성 값 | \(C=0.1925\) | \(C=0.0237\) | \(C=0.0\) |
각 행렬의 고유값을 보고 세가지 경우로 나눈다.
- c와 같이 두 개의 고유값 모두 0이거나 0에 가까우면 변화가 거의 없는 픽셀이다.
- b와 같이 고유값 하나는 크고 하나는 작으면 그곳은 한 방향으로만 변화가 있는 에지이다.
- a와 같이 고유값 두 개가 모두 크면 그곳은 여러 방향으로 변화가 있는 지점이다. 이곳이 특징점으로 적합하다. 해리스는 위의 세개의 경우가 일반적으로 적용할 수 있는 규칙임을 입증하고, 이를 바탕으로 고유값 두 개로 정의되는 식을 제안했다.
위 식은 두 고유값이 모두 클 때만 큰 값을 가지므로 특징점일 가능성을 측정하는데 용이하다.
여기서 k는 하이퍼파라미터이다. 보통 0.04 정도가 적절한 것으로 알려져 있다.
하지만 이 식은 계산의 효율면에서 부족하다. 고유값을 계산하는데 약간의 시간이 소요되기 때문이다.
고유값의 성질을 이용해 다음을 적용할 수 있다.
\(\mathbf{A} = \begin{pmatrix}p&r\\r&q \end{pmatrix} 일 때\),
\(\lambda_{1}+\lambda_{2}=p+q=trace(\mathbf{A})\)
\(\lambda_{1} \lambda_{2} = pq-r^2 = det(\mathbf{A})\)
따라서 C는 다음과 같이 쓸 수 있다.
\[C=det(\mathbf{A})-k \times trace(\mathbf{A})^2=(pq-r^2)-k(p+q)^2\]코드 구현
다음과 같이 0,1로 이루어진 이미지가 있다고 가정하자. 위의 표에서 a,b,c는 각각 이 이미지의 [7,7],[5,3],[2,8]에 해당한다.
import matplotlib.pyplot as plt
from util import *
import numpy as np
import cv2
img = np.zeros([12,12])
img[3:8,3]=1
img[4:8,4]=1
img[5:8,5]=1
img[6:8,6]=1
img[7,7]=1
plt.imshow(img,cmap='gray')
plt.show()
convolution 연산은 지난번에 구현한 im2col을 사용한다. 그리고 가우시안 마스크를 만드는 함수를 새로 작성했다.
def get_gaussian_kernel(sigma,size):
if size % 2 == 0:
size += 1
aran = np.arange(-1 * (size // 2), size // 2 + 1)
XX, YY = np.meshgrid(aran, aran)
ker = gaussian2d(XX, YY, sigma)
ker = ker/np.sum(ker) # normalization
return ker
파이썬의 경우 다음과 같이 하면 [-1,0,1]^T, [-1,0,1] 마스크를 적용한 것과 같다.
mask = get_gaussian_kernel(1, 3)
dy = np.pad(img[1:],((0,1),(0,0))) - np.pad(img[:-1],((1,0),(0,0))) # [-1,0,1]^T 마스크를 적용한 것과 동일
dx = np.pad(img[...,1:],((0,0),(0,1))) - np.pad(img[...,:-1],((0,0),(1,0))) # [-1,0,1] 마스크를 적용한 것과 동일
이제 A행렬의 경우 위의 식과 동일하게 구해진 미분 행렬을 하다마르곱을 한 뒤 가우시안 필터를 적용한다. 이 행렬의 값을 확인하면 위의 표와 일치하는 것을 확인할 수 있다.
>>> A_01 = np.expand_dims(conv(dx * dy, mask), -1)
>>> A_00 = np.expand_dims(conv(dy * dy, mask), -1)
>>> A_11 = np.expand_dims(conv(dx * dx, mask), -1)
>>> A = np.concatenate([np.concatenate([A_00, A_01], -1),
np.concatenate([A_01, A_11], -1)], 2)
>>> print("point a\n",A[7,7])
>>> print("point b\n",A[5,3])
>>> print("point c\n",A[2,8])
point a
[[ 0.52175143 -0.19895501]
[-0.19895501 0.52697637]]
point b
[[ 0.07511361 -0.07511361]
[-0.07511361 0.80104499]]
point c
[[0. 0.]
[0. 0.]]
특징 가능성 C 역시 위 표와 동일하다.
>>> k=0.04
>>> deter = np.linalg.det(A)
>>> trace = np.trace(np.transpose(A, (2, 3, 0, 1)))
>>> C = deter - (k* (trace ** 2))
>>> print("point a\n",C[7,7])
>>> print("point b\n",C[5,3])
>>> print("point c\n",C[2,8])
point a
0.19137437611297517
point b
0.023821169676266046
point c
0.0
이번에는 다음의 사진에서 해리스 코너를 검출해보자.
img = cv2.imread('./data/red_deer.jpg',cv2.IMREAD_GRAYSCALE)
plt.figure(figsize=(14,14))
plt.imshow(img,cmap='gray')
plt.show()

헤리스 코너는 다음과 같이 함수화 하였다. 아래에 use_det 같은 경우는 본문에서 쓴 바와 같이 두 개의 구현이 실제로 시간적인 차이가 있는지 확인하기 위해 구현한 것이다.
방금 삼각형이 그려진 이미지와는 다르게 opencv를 이용해 불러온 이미지는 255의 최대값을 가지므로 normalization을 해주어야 한다.
import time
def Harris_corner(img,threshold,use_det=True,k=0.04,max_value=255):
mask = get_gaussian_kernel(1, 3)
img = img/max_value
dy = np.pad(img[1:],((0,1),(0,0))) - np.pad(img[:-1],((1,0),(0,0)))
dx = np.pad(img[...,1:],((0,0),(0,1))) - np.pad(img[...,:-1],((0,0),(1,0)))
A_01 = np.expand_dims(conv(dx * dy, mask), -1)
A_00 = np.expand_dims(conv(dy * dy, mask), -1)
A_11 = np.expand_dims(conv(dx * dx, mask), -1)
A = np.concatenate([np.concatenate([A_00, A_01], -1), np.concatenate([A_01, A_11], -1)], 2)
if use_det:
deter = np.linalg.det(A)
trace = np.trace(np.transpose(A, (2, 3, 0, 1)))
C = deter - (k* (trace ** 2))
else:
eigens = np.linalg.eigvals(A)
C = eigens[..., 0] * eigens[..., 1] - (k * ((eigens[..., 0] + eigens[..., 1]) ** 2))
return np.where(C>threshold,C,0)
또한 검출된 코너를 시각화 하기 위해 다음과 같은 함수를 작성했다. cv2.circle은 이미지에 원을 그려주는 함수인데 x와 y의 순서에 주의를 해야한다.
def draw_harris_circle(img,harris,print_harris_value=False):
ys, xs = np.where(harris > 0)
gray = np.expand_dims(img, -1)
harris_img = np.concatenate([gray, gray, gray], -1)
for i in range(len(ys)):
harris_img = cv2.circle(harris_img, (xs[i], ys[i]), 10, (0, 0, 255),-1) # (x,y)로 들어감
if print_harris_value:
print("y = {}, x = {}, C = {}".format(ys[i],xs[i],harris[ys[i],xs[i]]))
return harris_img
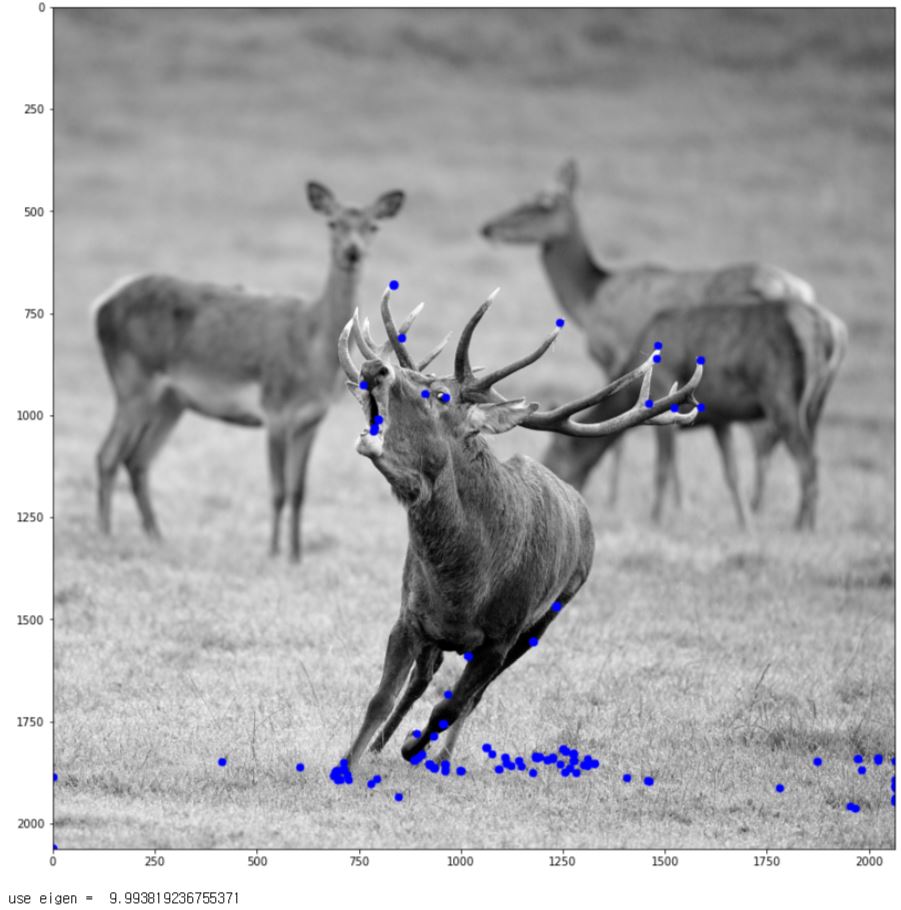
start=time.time()
harris = Harris_corner(img,0.02,False)
plt.figure(figsize=(14,14))
plt.imshow(draw_harris_circle(img,harris))
plt.show()
print("use eigen = ", time.time()-start)
start=time.time()
harris = Harris_corner(img,0.02,True)
plt.figure(figsize=(14,14))
plt.imshow(draw_harris_circle(img,harris))
plt.show()
print("use det = ", time.time()-start)
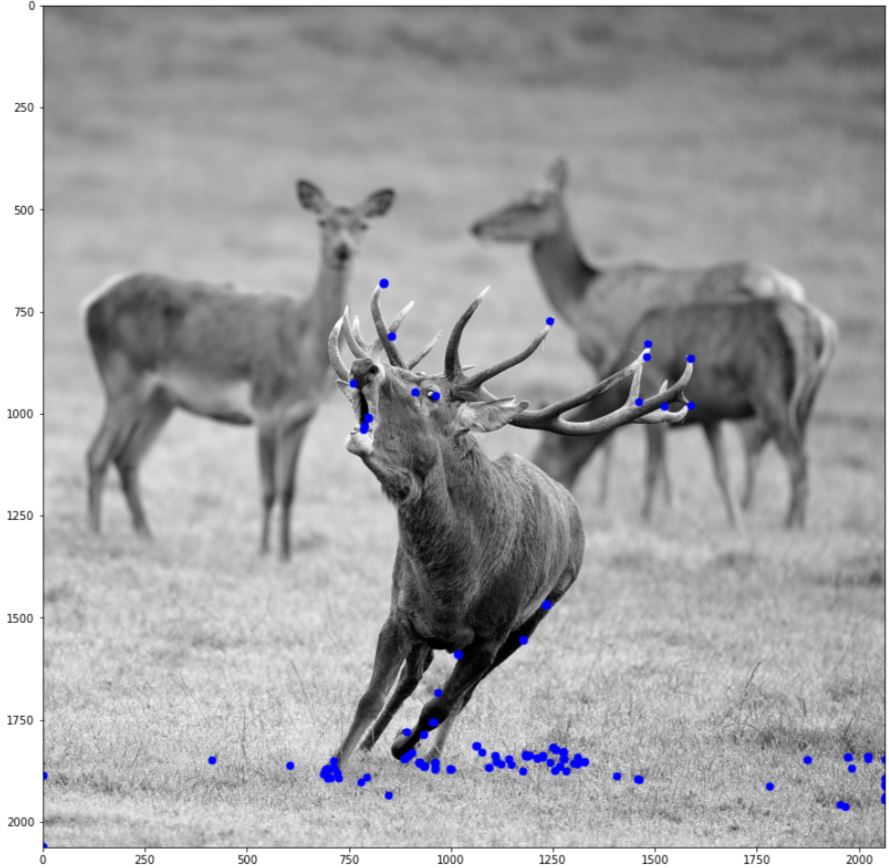
구현에 따라 분명히 차이가 날 것이고 더 좋은 구현이 있을 것이다. 우선은 고유값을 구하는 데에 시간이 오래 걸린다 정도만 기억 하자. 또한, 두 개의 결과가 동일하다는 것도 볼 수 있다.
해리스는 특징점 검출 알고리즘을 코너 검출기(Corner detector)라고 불렀다.하지만 위의 사진에서는 사슴의 뿔 끄트머리 뿐 아니라 눈동자도 검출 되었다. 이러한 이유로 시간이 지나면서 사람들은 코너라는 용어보다 특징점(feature point) 또는 관심점(interest point)을 주로 사용하게 된다.
Comments