가우스 요르단 소거법
가우스 소거법과 가우스 요르단 소거법
다음 세 가지의 기본 행 연산을 통해 연립일차방정식의 첨가행렬(계수행렬과 상수행렬을 묶은 행렬)을 기약 행 사다리꼴로 변환하여 해를 구한다.
1) 한 행을 상수배 한다.
2) 한 행을 상수배하여 다른 행에 더한다.
3) 두 행을 맞바꾼다.
먼저 가우스 소거법부터 살펴보자.
연립 방정식
다음과 같은 연립방정식을 생각해 보자 \(2x_1+3x_2+3x_3=9\\3x_1+4x_2+2x_3=9\\-2x_1-2x_2+3x_3=2\) 이는 2개의 행렬로 나타내면 다음과 같이 나타낼 수 있다. \(A=\begin{pmatrix}2&3&3\\3&4&2\\-2&-2&3\end{pmatrix}, \quad y=\begin{pmatrix}9\\9\\2\end{pmatrix}\) 가우스 소거법에서는 위의 행렬을 하나의 블록 행렬로 나타낸다. \(\left( \begin{array}{ccc|c} 2 & 3 & 3 & 9 \\ 3&4&2&9 \\ -2&-2&3&2 \end{array} \right)\left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\) 여기서 각 행의원소의 앞부분을 소거한다. 과정을 나타내면 다음과 같다. \(\left( \begin{array}{ccc|c} (1) & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ 3 & 4 & 2 & 9 \\ -2&-2&3&2 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ (0) & -\frac{1}{2} & -\frac{5}{2} & -\frac{9}{2} \\ (0)&1&6&11 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ 0 & (1) & 5& 9 \\ 0&1&6&11 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ 0 & 1 & 5& 9 \\ 0&(0)&1&2 \end{array} \right)\left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\\) 여기까지의 과정을 가우스 소거법이라고 한다. 가우스 요르단(Gauss jordan) 소거법은 여기서 한단계 더 나아간다. \(\left( \begin{array}{ccc|c} 1 & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ 0 & 1 & 5& 9 \\ 0&(0)&1&2 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & \frac{3}{2} & \frac{3}{2} & \frac{9}{2} \\ 0 & 1 & (0)& -1 \\ 0&0&1&2 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & (0) & \frac{3}{2} & 6 \\ 0 & 1 & 0& -1 \\ 0&0&1&2 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\ \Rightarrow \left( \begin{array}{ccc|c} 1 & 0 & (0) & 3 \\ 0 & 1 & 0& -1 \\ 0&0&1&2 \end{array} \right) \left(\begin{array}{}x_1\\x_2\\ x_3 \\\hline 1 \end{array}\right)=\begin{pmatrix}0\\0\\0\end{pmatrix}\\\) 이렇게 각 행이 바로 각 \(x_{i}\)의 해를 나타낸다.
역행렬
행렬 \(A\)의 역행렬 \(A^{-1}\)에 대한 관계를 다음과 같이 나타내자 \(A^{-1}(A|I)=(I|A^{-1})\) 이 식을 해석하면 가우스 소거법으로 A를 I로 만들면 우측에는 A의 역행렬이 나타낸다로 이해할 수 있다.
자세한 계산은 다음과 같이 계산된다 \((A|I)\\ \Rightarrow \left( \begin{array}{ccc|ccc} 2 & 3 & 3 & 1 & 0 & 0 \\ \hline 3 & 4 & 2 & 0 & 1 & 0\\ \hline -2 & -2 & 3 & 0 & 0 & 1 \end{array} \right)\\ \Rightarrow \left( \begin{array}{ccc|ccc} (1) & \frac{3}{2} & \frac{3}{2} & \frac{1}{2} & 0 & 0 \\ \hline 3 & 4 & 2 & 0 & 1 & 0\\ \hline -2 & -2 & 3 & 0 & 0 & 1 \end{array} \right)\\ \Rightarrow \left( \begin{array}{ccc|ccc} 1 & \frac{3}{2} & \frac{3}{2} & \frac{1}{2} & 0 & 0 \\ \hline (0) & -\frac{1}{2} & -\frac{5}{2} & -\frac{3}{2} & 1 & 0\\ \hline (0) & 1 & 6 & 1 & 0 & 1 \end{array} \right)\\ \Rightarrow \left( \begin{array}{ccc|ccc} 1 & \frac{3}{2} & \frac{3}{2} & \frac{1}{2} & 0 & 0 \\ \hline 0 & (1) & 5 & 3 & -2 & 0\\ \hline 0 & 1 & 6 & 1 & 0 & 1 \end{array} \right)\\ \Rightarrow \left( \begin{array}{ccc|ccc} 1 & (0) & -6 & -4 & 3 & 0 \\ \hline 0 & 1 & 5 & 3 & -2 & 0\\ \hline 0 & (0) & 1 & -2 & 2 & 1 \end{array} \right)\\ \Rightarrow \left( \begin{array}{ccc|ccc} 1 & 0 & (0) & -16 & 15 & 6 \\ \hline 0 & 1 & (0) & 13 & -12 & -5\\ \hline 0 & 0 & 1 & -2 & 2 & 1 \end{array} \right)\\ =(I|A^{-1})\) 이렇게 바로 \(A\)의 역행렬을 구할 수 있다.
물론 라이브러리에 구현이 되어 있어 손으로 계산할 일이 없지만 손 계산이 필요할 때 기억해 두면 좋을 것 같다.

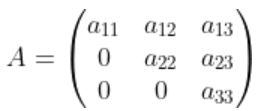 로 표현되는 상삼각행렬(Upper triangular matrix) 또는 하삼각행렬 (lower triangular matrix) 일 경우
로 표현되는 상삼각행렬(Upper triangular matrix) 또는 하삼각행렬 (lower triangular matrix) 일 경우  일 때, 다음을 만족하는 경우 B는 A의 전치행렬(Transpose Matrix)이다.
일 때, 다음을 만족하는 경우 B는 A의 전치행렬(Transpose Matrix)이다.